Fulgurex (http://www.fulgurex.ch/dt/portrait.html) ist ein schon seit vielen Jahrzehnten existierendes Traditionsunternehmen aus der Schweiz – und seit vielen Jahrzehnten baut Fulgurex den m.E. besten motorischen Weichenantrieb den ich kenne.
Aus der Zeit vor-Nächternhausen hatte ich noch eine kleine Anzahl dieser unverwüstlichen Antriebe und habe diese an weniger häufig genutzten Stellen auch in Nächternhausen noch eingesetzt.
Angesteuert wird der Antrieb über einen Lenz LS150 Decoder. Dessen Ausgänge liefern eigentlich Wechselspannung – aber mit 2 gegenschlägigen Dioden reicht der entstehende Rechteck-Gleichstrom vollständig aus um den Fulgurex Antrieb zu steuern.
Warum erzähle ich davon? Nun, nicht jeder mag sich vielleicht mit Servos rumschlagen und daneben kenne ich keinen Antrieb der gleichzeitig auch noch bis zu 4 (!) Umschalter mit eingebaut hat. Die sind natürlich ideal auch für komplexere Schaltvorgänge.
Hier das Einbaubeispiel wo ich diesen Antrieb verwende von oben:
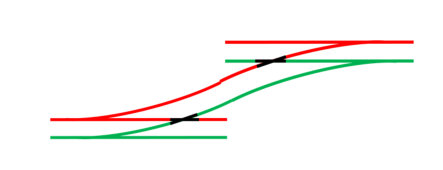
Kreuzung zwischen Normalspur und Schmalspur
Eine Kreuzung zwischen H0 und H0e und gleichzeitig davor eine Weiche. Die Kreuzung benötigt eine getrennte Polarisierung welche über die schaltende Weiche jeweils auf den H0 Zweig oder den H0e Zweig zugeordnet wird. Mit der Fulgurex wird sowohl das Herzstück der Weiche, als auch die Strombereiche der Kreuzung mit der richtigen Spannung versorgt.
Nun funktionieren diese Antrieb bei mir schon seit über 20 Jahren – aber ab und an brauchen sie halt mal Pflege – so gab es bei der Kreuzung seit einigen Tagen einen Kurzschluss beim Schalten.
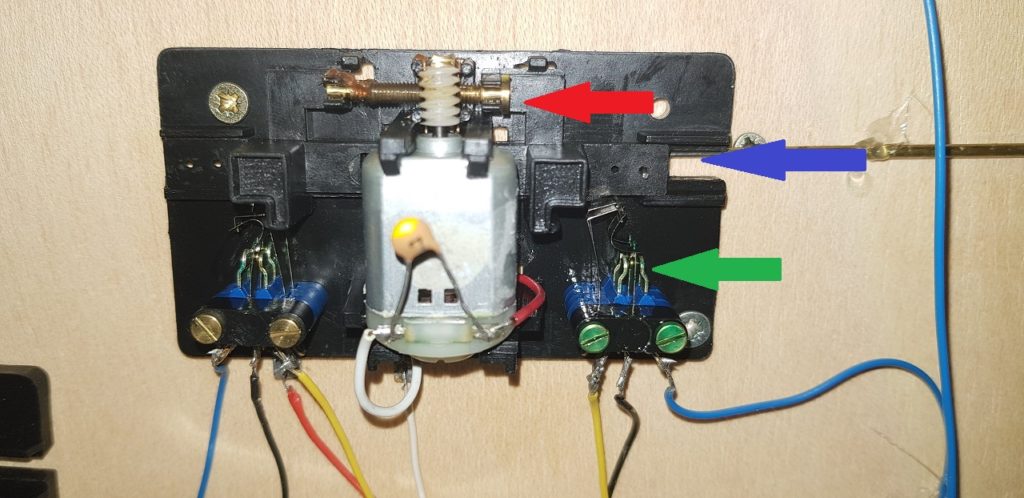
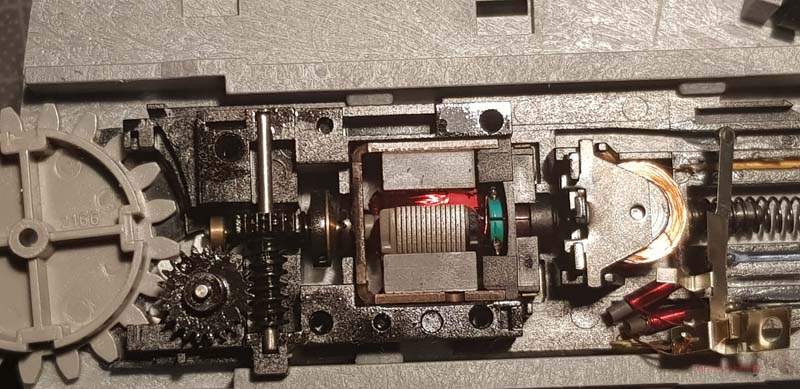
Grund dafür ist die Spindel (roter Pfeil) mit der der Motor die Stellzunge bewegt:
Weichenantrieb von Fulgurex
Diese Spindel benötigt nach einigen Jahren etwas Schmierfett – sonst läuft der Motor nicht bis zum Ende durch. Auch die Kontakte machen ab und an Probleme. Hier hilft aber entsprechendes Kontaktspray. Der Grund für den Kurzschluss war aber eine kleine Feder (oberhalb des grünen Pfeils) welcher die Umschalter erst beim Endanschlag umschaltet. Diese Feder war herausgesprungen was natürlich dazu führte das Plus auf Minus lag – die Folge kann sich jeder selbst ausmalen.
Kleine Ursache – grosse Wirkung! Aber dafür läuft der alte – und nicht gerade leise – Fulgurex jetzt wieder einwandfrei.
Um die Stellstange für den Motorantrieb wartungsoptimiert von unten einführen zu können, habe ich übrigens den Stellbereich (blauer Pfeil) mit einer Feile ein klein wenig verlängert. Es ist nur ein kleiner Eingriff, aber dafür ist die Führung der Stellstange zur Weiche optimal auf der Anlagenplatte justiert und wackelt nicht in der Gegend rum.
Und wen der Zusammenhang interessiert – hier noch ein kleines Video der Kreuzung (die jetzt endlich wieder befahrbar ist):
Artikel aktualisiert am 27.10.2022 Aktualisierung um einige neue Erkenntnisse
Digitalisierung einer Drehscheibe? Wer macht denn so was? Und warum willst du denn die Drehscheibe digitalisieren – das macht doch am meisten Spaß wenn man im Betriebswerk Hand anlegen muss? Funktioniert doch eh nie – viel zu ungenau! Riesenaufwand – würde ich nicht machen? Da musst du ja auch noch an der teuren Drehscheibe fräsen – da würde ich die Finger von lassen.
Wer sich für den folgenden Bericht interessiert: in Eisenbahnmagazin 10/22 habe ich dazu einen Artikel veröffentlicht. Hier die etwas detailliertere Darstellung
Vorgeschichte
Das waren so die typischen Aussagen die ich bekommen hatte als ich unter Moba-Kollegen erzählte das ich meine Drehscheibe digitalisieren will.
Vor allem brauchte ich eine neue Drehscheibe weil die uralte Fleischmann-Drehscheibe aus den 70er Jahren nur eine sehr “rudimentäre” Steuerungsmöglichkeit hatte um die Gleise anzufahren – und automatisch schon gar nicht.
Also musste eine Digitalisierung her.
Wer eine Drehscheibe digitalisieren will oder wissen will wie man diese ansteuert und wie es trotzdem noch vorbildgetreu ausschaut, dem helfen die folgenden Zeilen hoffentlich.
Materialien und Aufwand
Vorneweg: Der Aufwand hält sich in Grenzen und sollte auch für Laien machbar sein. Für die hier gezeigten Arbeiten muss man ca. 20h an Aufwand investieren (wenn man die Fehler nicht macht die ich selbst gemacht habe :-)). Folgende Materiaien waren für die Arbeiten erforderlich:
Fleischmann Drehscheibe Baujahr 2001 – bei E-Bay für 90€ ersteigert (die Drehscheibe hat noch Messinggleise)
Es wurden keine speziellen Hilfsmittel verwendet. Lötkolben, Uhrmacherschraubenzieher, Decoderlitze und Zange etc. sollten in jedem Modellbahnerhaushalt vorhanden sein.
Digitale Drehscheiben
Wer sich das Angebot an s.g. 26m Drehscheiben1natürlich gibt es auch kleinere Scheiben, aber man will ja seine großen Dampfloks auch gedreht bekommen – und das klappt mit einer kleinen Bühne halt beim Besten Willen nicht 🙂. anschaut wird schnell feststellen das es hier nur ein sehr kleines Angebot gibt:
Fleischmann und Märklin sind baugleich und in Deutschland mit am weitesten verbreitet
Roco hat die neuere Scheibe – wobei zu beachten ist das Roco und Fleischmann inzwischen der gleichen Firmengruppe – der Modelleisenbahn Holding2http://www.modelleisenbahn-holding.com/de/brands/index.html – gehören.
Hapo ist der Spezialist für Drehscheiben – hier gibt es auch Segmentscheiben, Sektionalscheiben und Schmalspurdrehscheiben
Heljan3http://www.heljan.dk/shop/frontpage.html ist ein dänischer Hersteller und wird in Deutschland von verschiedenen Händlern angeboten
Auch die britische Firma Peco liefert – in Deutschland über die Firma Weinert – Drehscheiben
Was ist eine digitale Drehscheibe überhaupt?
Wer seine Drehscheibe nur manuell steuert kann dies trotzdem digital machen. Auch meine alte Scheibe wurde mittels eines Decoders angesteuert. DCC Adresse #1 hat den Motor aktiviert, DCC Adresse #2 hat die Drehrichtung umgeschaltet, DCC Adresse #3 hat kontinuierlich weiter gedreht ohne am nächsten Gleis zu halten. Realisiert wurde das mittels zweier Relais und Funktionsdecoder. Solche Drehscheiben sind trotzdem in der Fachwelt keine digitalen Drehscheiben!
Problem: Der PC hat keine Ahnung darüber an welchem Gleis sich die Scheibe gerade befindet! Und natürlich kann ich nicht gezielt ein Gleis ansteuern sondern muss dies manuell machen indem ich schaue wo die Bühne gerade ist. Damit kann man nicht PC-gesteuert auf die Bühne oder in die Schuppengleise fahren! Grundsätzlich hat man in dem Moment ein Problem wo es nicht möglich ist gezielt ein Gleis über einen DCC Befehl gezielt anzufahren.
Gerade weil in Nächternhausen auch Züge im automatischen Betrieb enden und automatisch entkuppeln, wurden alle Loks (sofern sie denn beidseitig Kupplungen besitzen) Tender voraus von der anderen Seite angekoppelt. Vom Lärm der alten Fleischmannscheibe mal ganz abgesehen: Vorbildgerecht ist definitiv anders!
Digitale Decoder
Es gibt diverse Digitalsteuerungen für Drehscheiben – meine Wahl viel auf die DSD2010 von Sven Brandt. Gehört zwar zur teureren Variante, hat dafür aber auch mächtig viele Funktionen und im Nachhinein habe ich meine Entscheidung definitiv nicht bereut – aber davon später.
Der DSD2010 hat diverse – richtig coole – Funktionen wie:
Beleuchtung des Bühnenhauses
LED Blinklicht bei Bühnenbewegung
Soundmodul mit echtem Drehscheibensound
DCC oder MM Format mit Funktionen für 180° Drehung, Drehrichtung, Gleiswahl und Single Step
Steuerungs- und Inbetriebnahmesoftware
Langsame Beschleunigung und Ansteuerung der Zielgleise
Komplexes und gut funktionierendes Motormanagement
Ich habe mich für die Variante ohne Sound entschieden, da ich mittels Traincontroller 4D Sound effektivere Möglichkeiten für stationären Sound habe. Wer diese Möglichkeit nicht hat sollte sich aber durchaus die Variante mit Soundmodul anschauen.
Nicht jede Drehscheibe lässt sich digitalisieren – ob und mit welchem Decoder es funktioniert lässt sich nur beim Hersteller klären!
DSD2010 Decoder in Kürze
Beim DSD2010 handelt es sich um eine Lösung mit 2 Hauptplatinen: Eine Platine wird unter der Drehscheibenbühne platziert (die nennt sich deshalb “Bühne”), während die eigentliche Hauptplatine “Grube” davon getrennt eingebaut werden muß. Ich würde aber empfehlen die Platine möglichst nah an ein S88-Bus bzw. einen S88-Strang4falls man z.B. mehrere S88-Busse einsetzt wie beim LDT HSI-11 welches ich in Nächternhausen verwende zu setzen. Es werden keine zusätzlichen Anschlusskabel verlegt – die Bühnenplatine kommuniziert mit der Grubenplatine über das vorhandene Drehscheibenkabel5das bei 2L Fahrern aus 5 Kabeln besteht.
Überhaupt habe ich mir im Vorfeld mehr Gedanken über den Decoder gemacht als nötig.
Ausbau der alten Scheibe
Solltet ihr je in die Verlegenheit kommen: Messt eure alte Bühne aus! Auch die alte Bühne war eine 26m Bühne – war aber in 2,5 cm kleiner im Durchmesser da es keine Auffahrtstutzen gibt.
Da die alte Bühne 15° Abgängen hatte und die neue 7.5° gab es keine Probleme mit der Geometrie – die alten Gleisabgänge konnten also verbleiben. Hier mal wie das mit alter und neuer Bühne dann ausschaute:
Trennung der alten Drehscheibe
Testweise Einbau neuer Bühne
Wie man deutlich sieht, ist für die neue Fleischmann-Drehscheibe ein deutlich größeres Loch erforderlich! Die Gleisabgänge wurden mit dem Dremel getrennt bevor die neue Scheibe eingepasst wurde.
Die neue Drehscheibe auf keinen Fall sofort nach dem Einpassen einbauen!
Denn jetzt geht es erst mal an die elektrischen Anschlüsse und die Patinierung.
Patinierung – eine Drehscheibe altern
Digitalisierung Fleischmann Drehscheibe – erster Einbau
Die Drehscheibe wird zwar später auch problemlos ohne Alterung funktionieren, aber mal ehrlich: Wer hat schon mal eine neu eingebaute Dampflokdrehscheibe gesehen? Man findet im Netz nicht mal Bilder davon!
Eine Drehscheibe wirkt erst dann wirklich gut, wenn man ihr die tägliche Arbeit und das Alter ansieht.
Aber es macht kein Sinn das Rad neu zu erfinden – und so habe ich die Bühne und die Grube nach den Anleitungen von Sebb – dessen tollen Videokanal ich nur empfehlen kann – gealtert.
Die Bühne habe ich vor dem Patinieren ausgebaut und um die Technik beraubt (siehe dazu auch die Empfehlungen von Herrn Brandt zum Einbau des Decoders).
Ein paar Dinge habe ich dann aber doch anders gemacht als im Video dargestellt:
Das Bühnenhaus wurde durch ein entsprechendes Modell von Moebo Lasercut ersetzt. Das Haus braucht fast keine weitere Alterung mehr – aber es sieht halt schon besser aus als das alte Original von Fleischmann. Von Moebo ist auch die Echtholzimitation auf der Bühne.
Da Fleischmann früher Messingschienen verwendete die dann mit dem sonst bei mir genutzten Neusilber in ziemlichem Kontrast stehen, wurden die Abgänge alle abgelängt und mit eigenem Stromanschluß versehen – Schienenverbinder funktionieren hier nämlich nicht!
Sebb hat übrigens einige Empfehlungen zur verwendeten Alterungsfarbe gemacht. Daran muss man sich aber nicht sklavisch halten. Die Bühne hier wurde mit Vallejo-Farben gealtert.
Umbau der Bühne
Keine Angst vor dem Umbau der Bühne – es war einfacher als gedacht. Herr Brandt hat eine sehr detaillierte Einbauanleitung der nur wenig hinzuzufügen ist. Anfangs war ich wirklich skeptisch, ob die Bühne wirklich punktgenau – und wir reden hier ja wirklich von Zehntel Millimetern – halten kann. Meine erste Beobachtung dazu hat mich auch nicht gerade in Begeisterung versetzt:
Aber es funktioniert tatsächlich – hier ein paar Tipps die ich nur empfehlen kann:
Ladet euch die aktuelle Anleitung herunter! Im Netz kursieren diverse – teilweise veraltete – Anleitungen.
Ich hatte eine vollständig bestückte Platine. Falls ihr die Platine in der unbestückten Variante bestellt habt, schaut auf der Homepage von Digital-Bahn vorbei: Dort ist eine detaillierte Anleitung wie man die korrekte Bestückung am Schluss überprüfen kann!
Alle Arbeiten sollten an der ausgebauten Bühne stattfinden – die Grube sollte dabei möglichst auch ausgebaut sein – vor allem wenn diese nicht direkt erreichbar ist.
Das Langloch für den Sensor erst mit einem Bohrer vorbohren und danach erst mit einem Fräser nachfräsen. Die Kanten mit einer Feile bearbeiten.
Der Einbau des Sensors war bei mir etwas “knifflig”. Man muss genau die Platzierung prüfen und dann – wirklich vorsichtig – Sekundenkleber auf die Seiten geben. Am Besten nehmt ihr euch dazu einen Zahnstocher zur Hilfe um den Sekundenkleber auf die Seiten des Sensors aufzubringen. Und dann muss man wirklich genau platzieren damit Sensor und Empfänger durch das gefräste Loch durchschauen können.
Nutzt die Chance das die Bühne ausgebaut ist und reinigt Schleifringe und Kontakten – ich nutze da entweder Kontaktspray oder Isopropylalkohol.
Ein- und Ausbau der Bühne geht durchaus auch wenn man nur einen Bereich der Seitenauffahrten heraus nimmt. Aber: Dabei verkanntet man die Schleifringe sehr schnell weshalb ich davon abrate. Also bitte beide Seiten der Bühne entfernen und dann diese senkrecht (!) herausnehmen bzw. einsetzen. Links sieht man meine Bühne – auch das ich (um auf Höhe zu kommen) die Auffahrten mittels Korkstreifen und beidseitigem Klebeband unterlegt habe.
Hier sieht man die leere Bühne – bei dieser Gelegenheit empfiehlt sich die Patinierung der Bühne selbst – zwar sieht man nachher nicht viel davon, aber gerade die Seiten kann man jetzt einfach etwas blasser gestalten.
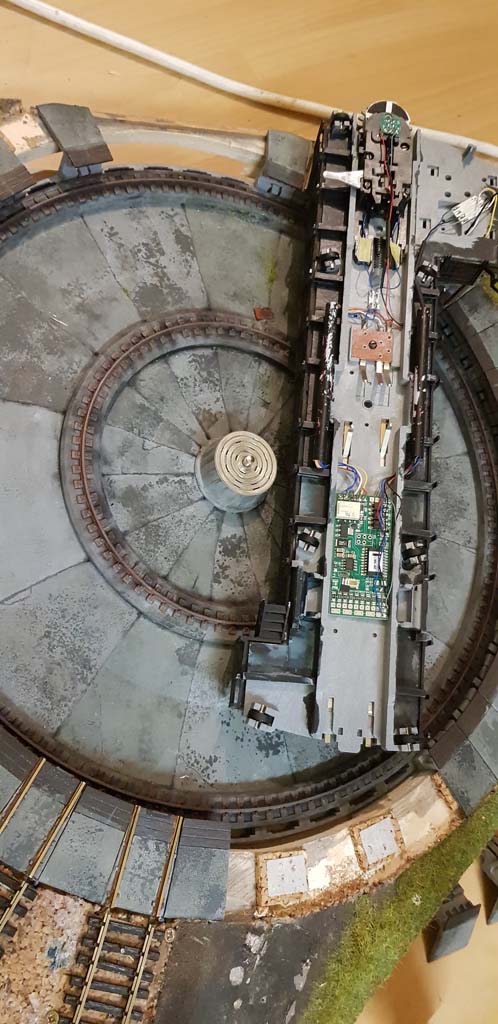
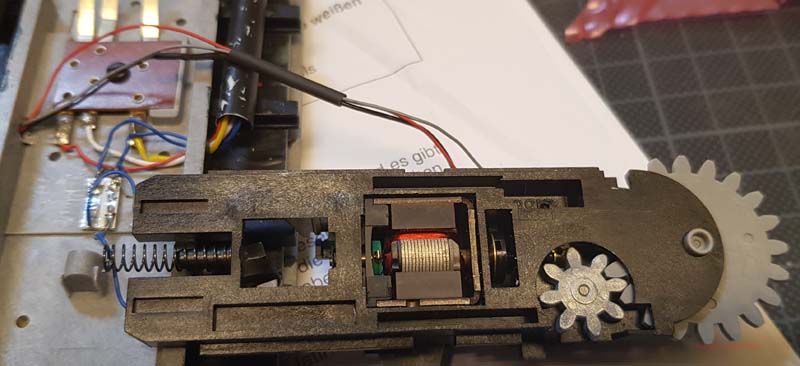
Der Umbau des Motors beinhaltet vor allem die Reduzierung des Motors um ganz wesentliche Teile – ich konnte das anfangs gar nicht glauben, aber schaut selbst:
Umbau Fleischmann Drehscheibe – Motor nach UmbauUmbau Fleischmann Drehscheibe- Motor vor Umbau
Bitte lest euch auf jeden Fall die – wirklich sehr gute – Dokumentation des DSD2010 genauestens durch. Ich habe hier wirklich nur die Themen angesprochen die ich dort nicht gefunden hatte. Insbesondere die Einstellung des Motortyps mittels der “Direct Drive” Funktion ist wirklich wichtig bevor die ersten Tests stattfinden.
Auf den Seiten von Digital-Bahn findet sich auch eine Beschreibung der verschiedenen Motortypen. Ich habe hier den schwächsten Kandidaten erwischt – trotzdem hatte ich bisher damit keine Probleme
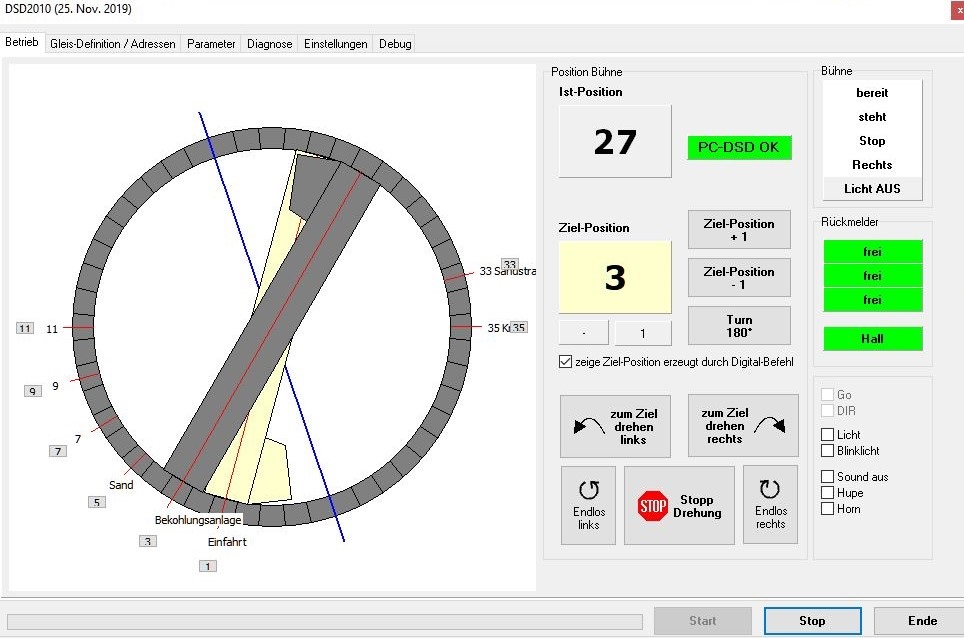
DSD2010 Steuerungssoftware
Bei Digital-Bahn gibt es eine kostenlose Steuerungssoftware zum Download. Ohne diese kann man die Bühne nicht einstellen – aber die Software kann auch zum Betrieb der Bühne dienen – und das sogar parallel zur Bedienung in Traincontroller.
Die Software ist richtig gut gemacht – so wird nicht nur die Stellung der Bühne und aller Parameter sehr deutlich dargestellt, auch die Information welche DCC Befehle gesendet worden sind kann man deutlich identifizieren.
DSD2010 – Drehscheiben Steuerungssoftware
Der Anschluss erfolgt über ein RS232 Kabel an den PC. Wer den USB nach RS232 Konverter von Digital-Bahn mitbestellt hat, der kann diesen Konverter auch direkt an das Board anschliessen und dann den USB Anschluss verlängern. Ein (relativ kurzes) USB Verlängerungskabel liegt bei. Ich würde aber empfehlen ein langes RS232 Kabel (Serielles Kabel DB9-Stecker / DB9-Buchse) zu verwenden da der Adapter sonst doch etwas wacklig auf der Grubenplatine sitzt und besser am USB Anschluß des PC befestigt wird.
Nutzt man eine PC Software zur Steuerung, so ist nach Einstellung die PC Anbindung nicht mehr erforderlich.
Die Nutzung des Programmes ist sehr detailliert beschrieben – daher erspare ich mir hier weitere Details.
Fehlermeldungen und Probleme
Ich kann hier nur Probleme aufführen die ich selber hatte und die nicht oder anders bei Herrn Brandt beschrieben sind. Bitte auf jeden Fall erst mal auf seiner Website nachsehen ob das Problem dort in der Dokumentation nicht vielleicht schon längst beschrieben ist. Die Fehlermeldungen in unten stehender Tabelle beziehen sich immer auf die Meldung im Steuerungsprogramm.
Problem
Fehlermeldung
Lösung
Bühne bleibt während der Fahrt stehen
COM: Keine Verbindung zur Bühne
Verbindung des Königsstuhls mit der Bühne überprüfen – Am Besten du misst alle elektrischen Verbindungen durch. Die Kontaktbleche vorsichtig biegen – auch die können Probleme bereiten. Ein Reinigen der Schleifringe (s.o.) sollte in jedem Falle erfolgen. Eine andere Fehlerquelle war bei mir der zu geringe Anpressdruck der Scheibe. Hier musste der Sprengring zusätzlich unterlegt werden.
COM: Keine Verbindung zur Bühne
Die Bühne bleibt zwar nicht stehen, aber in der Steuerungssoftware taucht immer wieder diese Fehlermeldung auf. Auch hier sollte man – siehe oben – die Verbindung zwischen Königsstuhl und Bühne prüfen.
Bühne bleibt während der Fahrt stehen
Leider verkantet die Bühne manchmal. Das erkennt ihr daran, das bei manueller Bewegung der Bühne an bestimmten Stellen die Bühne schwergängig ist. Hier half mir die Zufahrtsstutzen an besagter Stelle stärker nach außen zu biegen bzw. mittels Schraube zu sichern.
Bühne fluchtet nicht
Das kann mehrere Ursachen haben – siehe daher Beschreibung (1)
Manche Loks entgleisen bei Fahrt auf die Bühne
Hatte ich sogar nur bei einer Lok – genaue Analyse hat gezeigt, das wirklich nur 1/10 mm fehlte bei der Flucht der Bühne. Hier sind die über die Software verstellbaren Parameter dann wirklich zum Einsatz gekommen und haben das Problem gelöst.
Manche Loks halten nicht rechtzeitig
Eines der häufigsten Probleme – was dagegen zu tun ist beschreibe ich weiter unten
Rückmelder der Drehscheibenbühne reagiert zu spät
Dieses Problem hatte ich weil ich überwachte Abschnitte in den Gleisstutzen hatte und direkt anschliessend nicht überwachte Bereiche im Schuppengleis. Die nicht überwachten Bereiche müssen mittels Dioden das gleiche Referenzsignal erhalten wie der verwendete Stromfühler. Details sind in dem Beitrag gemäß 6http://www.digital-bahn.de/forum/viewtopic.php?f=13&t=1292&sid=e6521817aa2ca457914c1287f5cede68 erklärt.
Kurzschluss bei Bühnenbewegung
Nur ganz kurz gab es immer mal wieder einen Kurzschluss. Grund dafür war ein Gleisstutzen der nur einen Zehntel Millimeter zu weit in die Grube ragte. Gemerkt hatte ich das erst als die Bühne den Kurzschluss immer an der gleichen Stelle zeigte.
Anfängliches Stehenbleiben der Bühne war übrigens bei mir immer auf die Verbindung zwischen Bühne und Grubendecoder zurückzuführen. Bei meiner alten Bühne hatte ich da nie Probleme. Allerdings waren hier die Schleifringe auch wesentlich weiter auseinander als bei der Fleischmann/Märklinbühne. Erst nachdem ich die Schleifer weiter nach unten gebogen hatte als diese ursprünglich gebogen waren hat es damit keine Probleme mehr gegeben.
Dazu noch einen Trick: Haltet beim Einbau der Bühne einen Finger unter die Schleifer – so vermeidet man, das diese sich beim Einsetzen der Bühne bewegen (was dann wieder zu Kontaktproblemen führt).
(1) Bühne fluchtet nicht (siehe Bild links): Das hatte ich irgendwie andauernd! Aber der Motor lässt sich ganz leicht auch mit der Bühne bewegen und meistens hat das schon gereicht damit die Bühne danach wieder in die Flucht zurückkehrte.
In der Software des DSD2010 gibt es eine Einstellmöglichkeit um die Flucht zu optimieren, aber anfangs ging das auch nicht: Die Änderung der Einstellung hatte fast Null Effekt – hier war das Problem ein anderes:
Die Projektionsscheibe war zwar an 3 Stellen genau über dem Falz der Einrastung positioniert – nicht aber an der 4. Stelle! Hier fehlte nur 0,5 mm die der weiße Balken von der Rastmarke abwich (s. Bild). Eine neue Scheibe die sauber ausgeschnitten wurde (vor allem in der Mitte) löste das Problem.
Einstellungen
Es gibt diverse Einstellungen – und die selbsterklärenden bzw. die sehr gut im Handbuch beschriebenen will ich hier gar nicht aufzählen. Es gibt aber einige Einstellungen die einen vielleicht ins Grübeln bringen – insbesondere die 2L Fahrer. Daher hier mal einige Erläuterungen dazu
“Märklin-Modus” bei 2L??
Wer 2L fährt liest über solche Passagen schnell mal hinweg. Was geht mich irgendein Märklin Modus an? So dachte ich auch und hab den Märklin-Modus bei der Konfiguration in der DSD2010-Software erst mal unberücksichtigt gelassen.
Aber: Mit dem Märklin-Modus ist ausnahmsweise mal nicht nur der Märklin-Fahrer gemeint, sondern bei diesem Modus handelt es sich um ein Verfahren (eher ein Protokoll) zur Steuerung von Drehscheiben welches Märklin entwickelt hat und welches die meisten Steuerungsprogramme auch verstehen.
Der Vorteil: Der Decoder hat nur noch eine Hauptadresse und alle Bewegungen wie “fahre auf kürzestem Wege zu Gleis 3” werden von der Steuerungssoftware durchgeführt und müssen nicht mehr manuell eingegeben werden. Alle DCC (wohl auch die MM) Adressen zur Steuerung können wir vergessen weil diese Teil des Steuerungsprotokolls sind.
Mit dem Märklin-Modus hat man somit schnell ein Erfolgserlebnis und muss nicht mühsam der Steuerungssoftware mitteilen wie Gleis1 bis Gleis 48 denn bitte anzusteuern sind und mit welchen Adressen.
S88 Bus – wozu denn das?
Das mit dem S88 Bus hatte ich anfangs überhaupt nicht begriffen weil an allen Stellen immer wieder von einem Masse-Sensor die Rede ist.7man merkt an mehreren Stellen, das die Lösung 3L/Märklin-orientiert entwickelt worden war. Und bei 2L-Bahnen gibt es keinen Masse-Sensor, sondern nur Strom-Sensoren. Herr Brandt empfiehlt entweder ein Umbau des Bühnendecoders oder einen externen Strom-Sensor anzuschließen.
Fälschlicherweise ging ich daher davon aus, das man überhaupt keinen S88 Bus am DSD2010 anschließen muss, da ich ja eh den Stromsensor extern ansteuere – denn einen zusätzlichen Umbau des Decoders wollte ich mir dann auch nicht zutrauen.
Aber: Es macht natürlich vollständig Sinn den S88-Bus auch anzuschließen! Auch wenn wir die Rückmeldesignale nicht auswerten, der Decoder kann hiermit wichtige Informationen an den PC zurückmelden die im 2L-Betrieb sogar zwingend erforderlich sind wenn man automatische Zugfahrten über die Bühne steuern will.
Ein Beispiel: Über den S88 wird zurückgemeldet das die Bühne die Zielposition final erreicht hat. Erst jetzt kann eine laufende Zugfahrt die Bühne befahren.
S88 Meldungssignale
Wenn ein PC die Bühne steuert, dann sollte er wissen wann die Bühne auch am jeweiligen Gleis steht bzw. wo sie aktuell steht.
Die Kenntnis von Zielgleis und aktuellem Gleis verhindert, das die Lok das Fahrsignal erhält bevor die Bühne tatsächlich auch in der richtigen Position steht!
Soll z.B. der Schuppen in Gleis 9 angefahren werden und die Bühne steht in Gleis 1, so muss der PC dem DSD2010 die Information mitteilen: Fahr mal bitte auf Gleis 9. Und er muss wissen wo die Bühne steht weil es vielleicht effektiver ist rechts herum zu drehen als links herum.
Mit der Information über die aktuelle Bühnenposition kann man aber noch viel mehr anstellen! Dazu findet ihr im Kapitel zu Traincontroller einige Ideen.
Aufbau S88
Ursprünglich ging man bei der Entwicklung von S88 davon aus, das ein S88 Modul immer 16 Meldeeingänge beinhaltet. Tatsächlich gibt es aber auch “halbe” Module mit nur 8 Eingängen.
Der DSD2010 macht da keine Ausnahme – ist aber doch das erste Modul welches ich gesehen habe, bei dem man die Anzahl an Ausgängen selbst konfigurieren kann! Wie dies funktioniert steht in der Beschreibung. Am sinnvollsten halte ich dabei die Konfiguration mit 16 Meldefunktionen die sich wie folgt darstellen:
Adresse Melder
Information
1
Sobald die Bühne aktiv ist – also auch wenn der Sound noch läuft usw. – ist dieser Melder aktiv. Wichtig: Der Decoder nimmt keine anderen Befehle an so lange wie dieser Melder aktiv ist.
2
Der Hall Sensor ist aktiv – die Information habe ich aber nur zum Einstellen des Hall Sensors verwendet und nicht in der Steuerungssoftwareür 2L uninteressant – hier würde sich ein vorderer Massemelder melden
3
für 2L uninteressant – hier würde sich ein mittlerer Massemelder melden
4
für 2L uninteressant – hier würde sich ein hinterer Massemelder melden
5
für 2L uninteressant – hier würde sich ein hinterer Massemelder melden
6
Die Bühne ist in Bewegung. Eigentlich fast identisch mit Adresse 1 – nur das Melder 1 schon vorher anspringt. Während Melder 6 aktiv ist sollte man die Lok nicht mehr bewegen!
7
Der wichtigste Melder: Sobald die Bühne fertig ist mit einer Befehlsabfolge, so wird dieser Melder aktiv. Erst jetzt können neue Befehle erfolgen bzw. die Lok die Bühne verlassen. In der Steuerungssoftware dient dieser Melder auch als Positionsmelder der mitteilt das die Zielposition erreicht wurde.
8
für den hier eingestellten Modus nicht relevant
9
\[P_{9} \text{ Position der Bühne – Bit 0} \]
10
\[P_{10} \text{ Position der Bühne – Bit 1 } \]
11
\[P_{11} \text{ Position der Bühne – Bit 2 } \]
12
\[P_{12} \text{ Position der Bühne – Bit 3 } \]
13
\[P_{13} \text{ Position der Bühne – Bit 4 } \]
14
\[P_{14} \text{ Position der Bühne – Bit 5 } \]
15
\[P_{15} \text{ Position der Bühne – Bit 6 } \]
16
\[P_{16} \text{ Position der Bühne – Bit 7 } \]
S88 Konfiguration DSD2010 für Nächternhausen
Die Position ist binär codiert (BCD Code). Die reale Position eines aktuellen Gleises errechnet sich wie folgt:
Eine typische Drehscheibe hat 48 Gleisabgänge – deshalb benötigen wir die Bits 15 und 16 auch nicht.
Daneben gibt es noch die Möglichkeit Fehlerstati auszulesen oder die aktuelle Gleisfunktion dezimal darzustellen – entsprechend benötigt man mehr S88 Ausgänge.
Aber die Fehler findet man auch detailliert in der DSD2010 Software und im Fehlerfalle sollte man eh die RS232 Schnittstelle am PC anschliessen. Und eine Steuerungssoftware mit der man keine Binärdaten berechnen kann ist ihr Geld nicht wert.
Hall Sensor
Da meine Bühne im hintersten Eck der Anlage platziert ist und die Bühne nur mit einigem Aufwand manuell bewegt werden kann, habe ich mich für die Variante mit Hall-Sensor entschieden. Bei dieser Verfahrensweise erkennt ein entsprechendes elektronisches Bauteil (der Hall-Sensor) ein magnetisches Feld. Das magnetische Feld wird mittels eines Magneten erzeugt welcher unter der Bühne die Position des Referenzgleises 1 bestimmt.
Die Positionierung des Hall-Sensors kann etwas aufwändig werden. Netterweise ist im Lieferumfang ein sehr leistungsfähiger NeoDym Magnet – nur hält der halt leider nicht auf Kunststoff 🙁
Ich habe mir deshalb ein dünnes Stück Metall auf die Gegenseite gelegt und konnte so wenigstens erkennen wo der Magnet denn gerade auf der Unterseite liegt8außerdem hält jetzt auch der Magnet ohne ihn gleich festkleben zu müssen. Ob der Hall Sensor jetzt genau drüber zum stehen kommt erkennt man wenn man den S88 Bus anschließt.
Nachdem ich den Sensor – vermeintlich – richtig positioniert hatte, die Bühne eingebaut war und der Magnet wirklich dauerhaft festgeklebt war, hatte ich beim späteren finalen Einbau und Verdrahten dann aber doch das Problem, das die Bühne das Referenzgleis 1 (von 48) beim Anfahren von Gleis 2 als Gleis 2 identifizierte während es bei Anfahrt von Gleis 48 richtig als Gleis 1 identifiziert wurde.
Dieses Problem lies sich allerdings einfach lösen, indem man den unter der Bühne angebrachten Sensor mit einem Schraubenzieher o.ä. ganz leicht zur Seite biegt. Wir reden hier wirklich nur von wenigen Millimetern die der Sensor zu früh ausgelöst hatte.
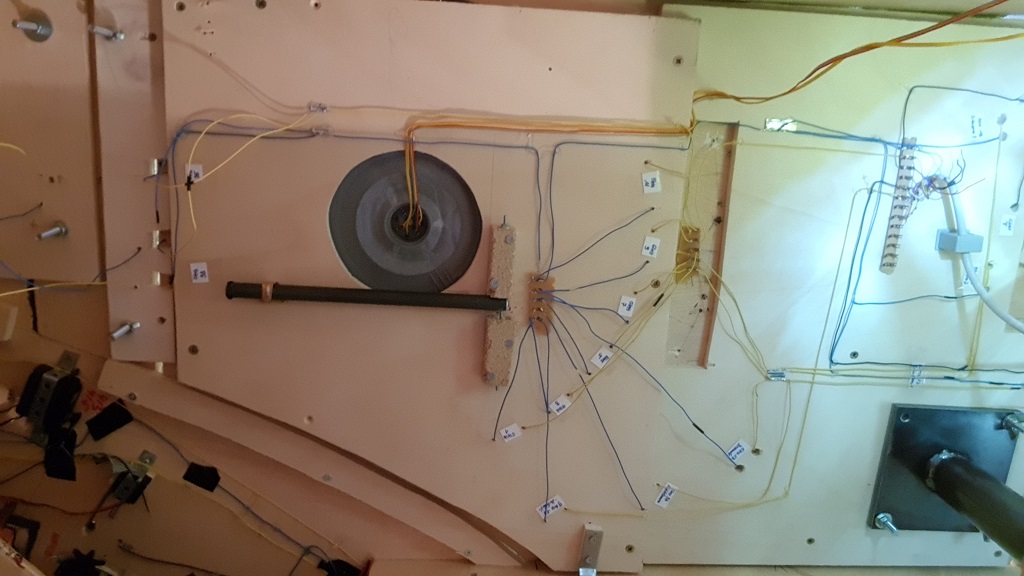
Verkabelung
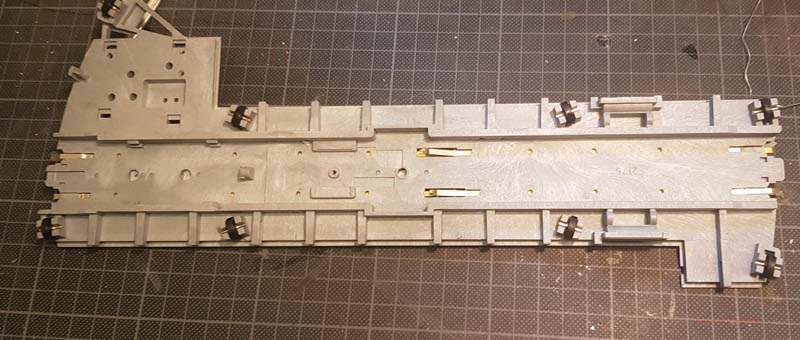
Obwohl meine Bühne insgesamt 8 Abgangsgleise hat, verwende ich nur insgesamt 3 Stromsensoren. Auf dem unten stehenden Bild kann man gut erkennen, das die Anschlußstutzen alle auf einen Sensor gelegt sind – Ausnahme sind Gleise die sich gegenüberliegen. Hier kommt ein 2. Sensor zum Einsatz. Der 3. Sensor wird für die Bühne selbst verwendet und an dem Grubendecoder angeschlossen.
Da kommen wir zu einem Thema welches mich schon seit Beginn der Beschäftigung mit dem Thema Modelleisenbahn geärgert hat: Kein Hersteller erzählt einem die technischen Basics! So ist es bei den meisten Boostern und Zentralen möglich diese alle auf einen gemeinsamen Rückleiter zu schalten. Dadurch reduziert sich der Verkabelungsaufwand natürlich enorm. Wichtig: Der Digitalstrom – also der Ausgang nach den Boostertrafos darf nur so verkabelt werden – nicht aber die Trafos die zur Bereitstellung des Digitalstroms dienen!
S88 Stromsensoren
Blick auf die Drehscheibe und deren Verkabelung von unten
Stromsensoren verwenden wir damit der PC weiss, ob ein Gleis belegt ist oder nicht – und damit die Loks zentimetergenau auf der Bühne halten.
Ohne Stromsensoren ist eine automatische Steuerung der Bühne nicht möglich
Es gibt diverse Hinweise – auch von Herrn Brandt – das Stromsensoren ein Problem sind, weil die Loks an unterschiedlichen Stellen den Sensor auslösen – je nachdem ob die erste Achse oder erst die dritte Achse den Sensor auslöst. Eine Lok die 29cm lang ist hat auf einer 31cm Bühne dann wirklich punktgenau zu halten.
Aber was soll ich mit einer digitalen Drehscheibe anfangen die ich nicht auch vom PC gesteuert automatisch befahren werden kann. Schaut mal auf den Link ganz am Schluß
Da zeige ich meine aktuelle Bühne als Video – und wie man dort sieht halten auch alle langen Loks problemlos mittig.
Detaillierung
Nachdem die Bühne fertig war, die Steuerung getestet war und alle Bühnengleise befahren wurden und auch die ersten Zugfahrten in Traincontroller ohne Probleme funktionierten konnte es endlich an die Detaillierung der Bühne gehen.
Digital Steuerung – geht das denn jetzt?
Ihr habt es also echt geschafft bis hierhin mitzulesen! Aber jetzt kommt ja auch eigentlich erst die Erläuterung was der ganze Aufwand gebracht hat.
Und daher die Frage: Funktioniert das jetzt eigentlich mit der digitalen Steuerung?
“Ja, aber” wäre eigentlich die richtige Antwort. Um es vorwegzunehmen: Nur das Einmessen alleine und die niedrige Geschwindigkeit hat es auch nicht gebracht. Es gibt Loks in meinem Fuhrpark die erst dann richtig auf der Bühne halten wenn der Motor warm ist d.h. die Loks mindestens eine Ehrenrunde auf der Anlage vorher gedreht haben. 4 von 6 der langen Loks haben keine Probleme9kurze Loks haben sowieso kein Problem.
Entgegen den Empfehlungen habe ich nur einen Stromsensor auf der Bühne – mehrfache Trennung nutzt hier nämlich nicht. Stattdessen sollte das Einmessen und natürlich die Länge der Loks in der Software eingestellt sein.
Damit meine 2 Problemkandidaten dann auch noch auf die Bühne fahren können habe ich am Ende der Bühne (also auf dem der Haupteinfahrt gegenüber liegenden “Festland”) einen IR Melder eingebaut. Dieser hat einen Empfangsbereich von ca. 10cm und kann damit auch problemlos eine Lok stoppen die dem Bühnenende zu nahe kommen sollte.
Grundsätzlich ist natürlich auch die Verwendung einer leistungsfähigen Steuerungssoftware – wie Traincontroller – erforderlich. Davon abgesehen gilt folgendes:
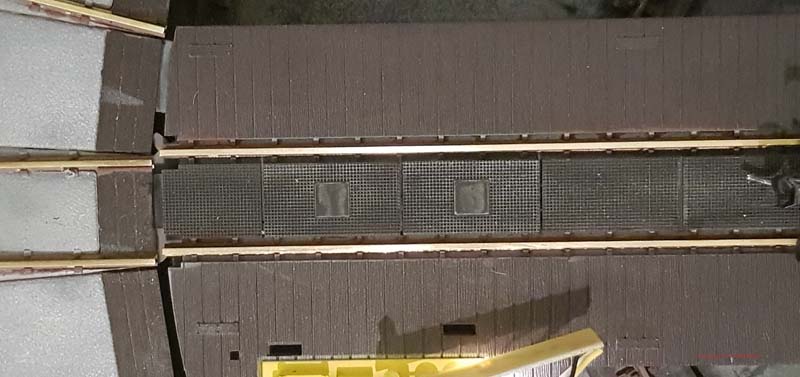
Schienen sollten absolut plan verlegt sein – wer genau auf meine Scheibe schaut wird feststellen das ich an einigen Stellen kleine Schrauben in die Anschlussstutzen gedreht habe um die Höhe optimal zu justieren.
Vermeiden sie Kurven vor der Einfahrt auf die Bühne – dummerweise ist in Nächternhausen genau das Einfahrtsgleis in einer (leichten) Kurve. Eine 50er von Trix verkantet hier leicht und setzt deshalb langsamer auf die Bühne. In der Folge wird sie später vom Stromsensor erkannt und hält zu früh an sodaß noch eine Achse auf den Anschlussstutzen ragt 👿
Nicht überwachte Anschlussgleise müssen mittels Dioden angeschlossen werden. Sonst überbrückt nämlich gerade eine lange Lok die Verbindung zwischen nicht überwachtem und überwachtem Bereich sodaß der Stromsensor erst meldet wenn die Lok vollständig im überwachten Bereich angekommen ist – ein Fahren über das Ziel hinaus ist damit vorprogrammiert10wer sich für die Details interessiert dem empfehle ich den Link in obiger Tabelle der Probleme.
Nur Loks die eine einwandfreie Meldung erzeugen werden auch mittig auf der Bühne zentimetergenau halten können. Manchmal sind gerade die ersten bzw. letzten Achsen aber mit Haftreifen versehen die nur sporadisch wirklich eine Meldung verursachen. In solchen Fällen hilft nur die Stromabnahme dieser Haftreifen zu entfernen – gerade lange Tenderloks haben in der Regel genug Abnahmepunkte übrig. Und bei den kleinen Loks haben wir das Problem nicht.
Einwandfreie Meldung bedeutet auch: Saubere Schienen und saubere Räder. Ich reinige meine Räder der Loks nach ca. 40h Betrieb – auch hier teilt mir der PC mit wenn die nächste “Inspektion” fällig ist.
Jede Lok und jeder Motor verhält sich anders. Deshalb werden die Loks in den verwendeten Steuerungsprogrammen eingemessen. Dieses Einmessen sollte mit größtmöglicher Sorgfalt erfolgen. Messen sie danach das Kriechverhalten auf einer 30cm langen Teststrecke und passen sie gegebenenfalls das Bremsverhalten an (in Traincontroller ist dies eine Funktion im Einmessvorgang).
Zur Sicherheit können sie gegenüber dem Einfahrtsgleis mit einem IR Melder ausstatten. (Vielleicht schaffe ich es irgendwann einmal einen Bericht zu IR Meldern zu machen). Diesen kann man auch gut in einem Busch oder – wie bei mir in einem Prellbock verstecken. In Nächternhausen habe ich den IR Melder da ich den oberen Punkt mit den geraden Zufahrtsgleisen leider nicht einhalten konnte.
Hier ein Beispiel einer Lok die vor der Bühne stehen geblieben ist weil die Gleise nicht absolut eben waren
Und dann ist natürlich noch das Wichtigste – die richtige Programmierung:
Steuerung mittels Traincontroller
Anfangs hatte ich nur Probleme damit! Der Grund war mein fehlendes Wissen über den Märklin Modus der Drehscheibe – auch war mir unklar warum die Scheibe die Adresse 225 (default) haben sollte wenn doch damit nur das Licht eingeschaltet wird?
Also habe ich mühsam alle Gleise mit Makros versehen – aber man sollte die Dokumentation halt genau lesen 😈
Wenn der DSD2010 auf Märklin Modus gestellt ist, so ist in Traincontroller lediglich die Basisadresse einzustellen und als Drehscheibentyp “Märklin digital”. Und das bei einer Fleischmann Drehscheibe!
Wichtig ist dabei noch, das der Melder für die Positionsüberwachung bei Traincontroller dem Melder für die Beendigung der Bühnenbewegung beim DSD2010 entspricht.
Die Geschwindigkeit der Bühne sollte maximal 10km/h betragen – das ist nicht nur vorbildgetreu, sondern hat auch den Vorteil, das die Loks wirklich punktgenau mittig auf der Bühne halten. Eine wichtige Voraussetzung bei punktgenauem Halten ist für Traincontroller das 100%ige Einmessen der Loks (das ist an anderer Stelle im Freiwald Forum beschrieben).
Den Melder auf der Bühne mit Memory beim Ausschalten versehen.
Den Haltmelder mittels Formel berechnen. Halt ab Zugspitze mittels: halbe Länge der Bühne + (Loklänge / 2). Versuche mit mittigem Bremsen funktionieren bei langen Loks schlechter.
Den Bremsmelder ebenfalls mit Formel (s.o.) berechnen
Loks vorher einmessen
Eine Lok liess sich beim besten Willen nicht überzeugen mittig aufzufahren. Der Grund dafür lag in der speziellen Stromaufnahme der Lok – einer BR50 von Trix. Hier wird nur an den 4 Achsen des Tenders der Strom abgenommen – die Lok selbst hat nur Massekontakt. Das führt aber trotzdem dazu das der Melder meldet! Ich habe dann einfach den Massekontakt vom Gehäuse gekappt – die Lok läuft auch mit 8 Abnahmepunkten noch gut.
Räder säubern. Wenn der Kontaktpunkt nicht stimmt hilft nur noch die “Notbremsung” – siehe die Beschreibung weiter unten.
Mit obigen Einstellungen hat es fast immer funktioniert! Allerdings halt leider nur fast 🙁 Zu oft sind halt doch die vorderen Räder verdreckt und auf einer 30cm Bühne ist bei einer Lokomotive mit 26 cm Länge halt gerade noch hinten und vorne 2cm Platz!
Die Konfiguration in Traincontroller ist aber ein eigenständiger Beitrag – falls ihr Interesse daran habt hinterlasst doch einfach einen Kommentar zu diesem Beitrag. Bis dahin kann ich auch empfehlen mal in den Downloadbereich zu schauen – dort findet sich die aktuelle Version meiner TC Datei mit der konfigurierten Drehscheibe.
Da für mich die Drehung der Loks um 180° vornehmliches Ziel der automatischen Steuerung war und ich in jedem Falle sicher gehen will das diese wirklich funktioniert habe ich noch 2 “Sicherungen” eingebaut:
Die Notbremsung
Um sicher zu gehen, das Loks wirklich garantiert auf der Bühne halten habe ich am Aussenrand der Bühne einen IR Sensor fixiert.
Die Sperre
Da ich nur die Auffahrstutzen mit Meldern versehen habe, werden diese auch nur aktiviert wenn eine Lok auf die Bühne zufährt. Auch im Regelbetrieb wird nie eine Lok so nah an der Grube zum Halten kommen. Diese Stutzen kann man auch dazu verwenden um zu vermeiden das eine Lok die doch mal zu früh zum Stehen kommt dann die Bühne in Gang setzt. Die Folgen kann sich jeder selbst ausmalen
Zum Schluß
Wahnsinn wenn ihr es bis hierher ausgehalten habt! Ich hoffe diese Informationen sind für alle diejenigen die planen eine Drehscheibe zu digitalisieren in irgendeiner Weise hilfreich. Nutzt doch bitte das Kommentarfeld wenn ihr was damit anfangen könnt, oder wenn ihr noch Fragen habt oder weitere Anregungen.
Hier dann noch mal ein kleines Video welches ich erstellt habe um zu zeigen was ich mit der Digitalisierung erreicht habe und wozu ich die digitale Steuerung vornehmlich verwende.
Thats it!
All denen die jetzt meinen das man eine Drehscheibe doch eh’ nur manuell ansteuern sollte: Auch das ist nach wie vor möglich und wird auch rege genutzt – aber gerade bei Endbahnhöfen oder – wie in Nächternhausen – beim Ende einer Nebenstrecke, kann eine Digitalisierung den Spielbetrieb massiv erhöhen.
Artikel aktualisiert am 05.02.2023 Neue Funktionen aus 2022 hinzugefügt, TC V10 Export
Steuerst du die Anlage auch mit Traincontroller? Und hast du dich auch schon darüber geärgert, das nur wenige Lokfunktionen im Programm mit Bild vorhanden sind?
Dann könnte diese Information für dich hilfreich sein. Im Laufe der Jahre habe ich eine Liste von ca. 70 verschiedenen Lokfunktionen erstellt bzw. zusammengetragen, die ich euch gerne hier zum Download bereitstelle
Eine kostenlose Bibliothek mit Lokfunktionen für das Programm Traincontroller
Der Vorteil dieser Bibliothek ist, das man nun im Lokführerstand und allen Programmbereichen (wie z.B. Funktionslisten) schon anhand des Bildes erkennen kann welche Funktion an der jeweiligen Lok aktiviert bzw. deaktiviert ist.
Installation
Ladet die entsprechende ZIP Datei aus dem Downloadverzeichnis (hier)
Entpackt die Datei in ein Verzeichnis eurer Wahl
Zur Installation ruft ihr dann Traincontroller mit eurer Projektdatei auf.
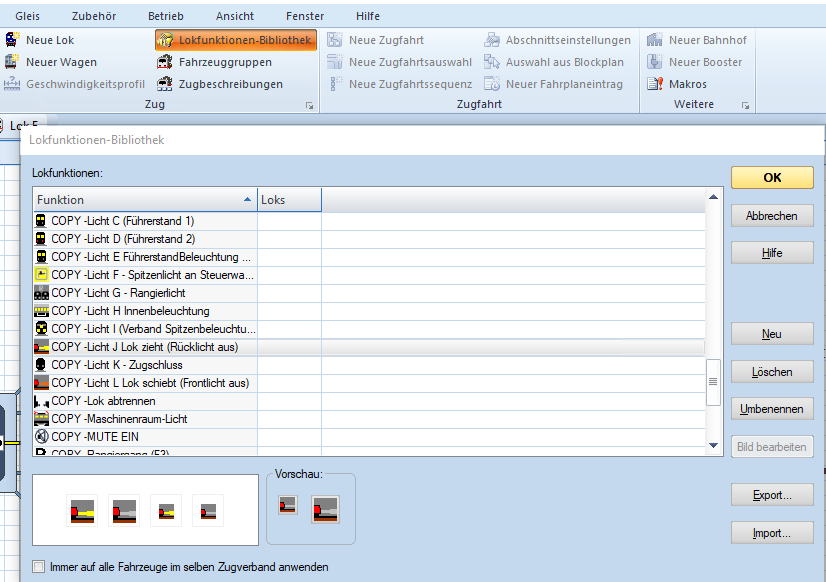
In Traincontroller die Lokfunktionen-Bibliothek (Bearbeiten – Lokfunktionen-Bibliothek) aufrufen und dort Import wählen. Dazu die eben extrahierte Datei importieren.
Alle neuen Symbole haben den Namen “COPY -…..” Damit wird vermieden das eure eigenen Symbole überschrieben werden. Ihr könnt dann alle Symbole löschen die ihr nicht benötigt und natürlich auch in einen Namen eurer Wahl ändern.
Wer noch weitere Lokfunktionen sucht findet diese auch im Netz – z.B. im Forum von Traincontroller.
Update: Wie es aussieht, kann man die Funktionen unter Traincontroller V8 nicht importieren – hier ist wohl mindestens V9 oder V10 erforderlich – Danke an Werni für den Hinweis!
Bitte beachten: Die hier bereitgestellten Dateien dürfen ausschließlich zum privaten Gebrauch verwendet werden. Eine kommerzielle Nutzung ist untersagt.
Ich verwende für Nächternhausen Servodecoder der Firma MBTronik1http://www.mbtronik.de/. Warum ich Servos als Antrieb von Weichen, Signalen, Toren usw. empfehle habe ich im Technikbereich geschrieben.
Ich bin mit diesen Decodern sehr zufrieden – allerdings musste ich im Laufe der Zeit relativ viel lernen. Hätte ich es vorher gewusst wäre mir einiges an Arbeit erspart geblieben. Damit es euch nicht genauso passiert habe ich diesen Beitrag verfasst.
Die folgenden Tipps beziehen sich auf den Betrieb von Servodecodern des Typs WA5 der Firma MBTronik. Viele dieser Tipps treffen aber auch auf andere Servodecoder zu.
Produktübersicht
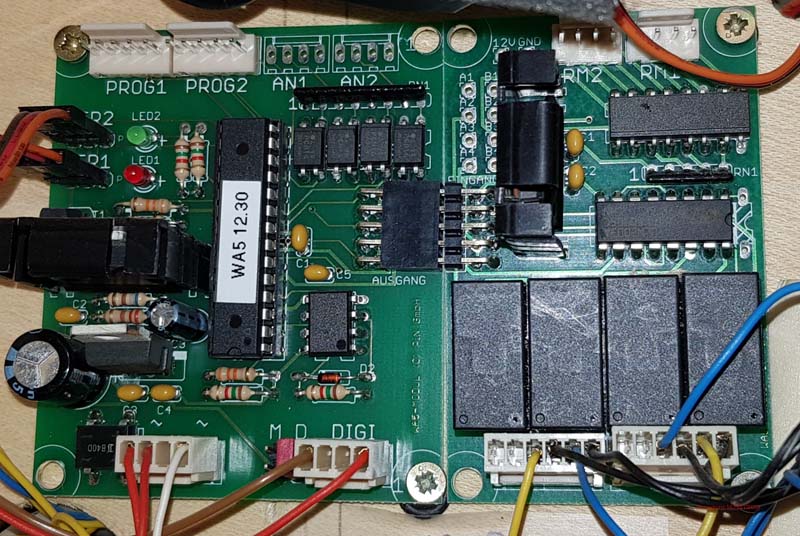
MBTronik WA5 Servodecoder
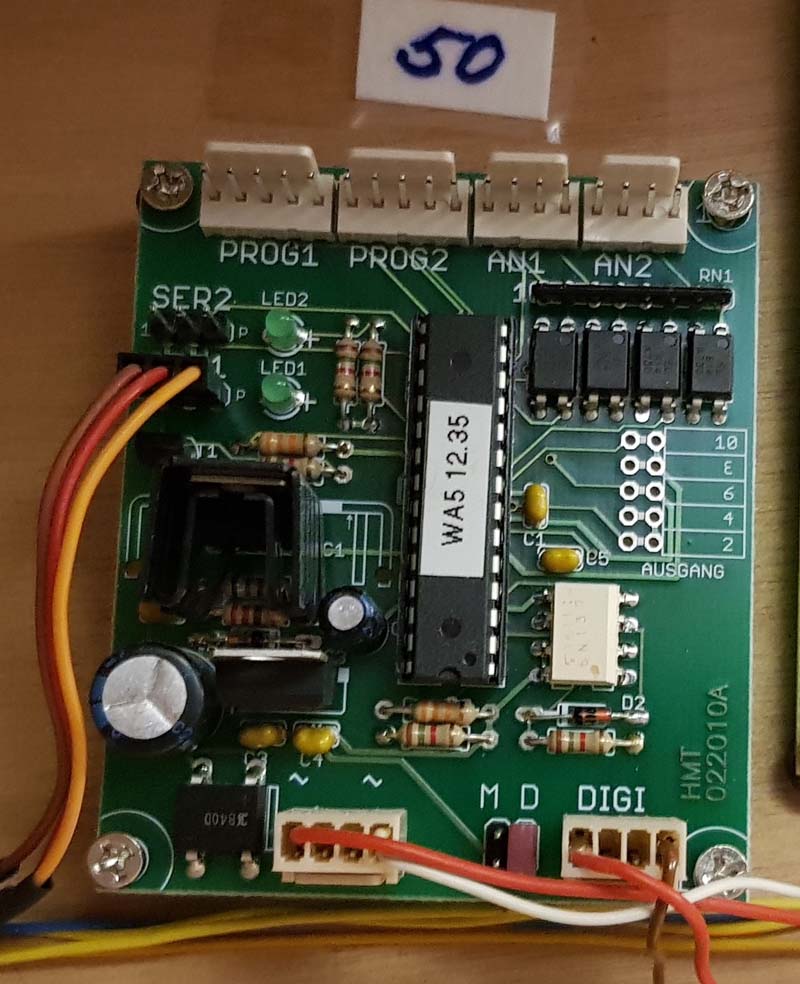
MBTronik WA5 Mini Servodecoder
Bei MBtronik gibt es sowohl Decoder für DCC, als auch für das Selectrix System. Im folgenden betrachte ich ausschließlich die DCC Decoder da ich keine Erfahrungen mit Selectrix habe.
Basis aller Decoder ist der WA5. Es gab früher auch die WA4 und WA3 Reihe. Beide sind aber schon lange überholt und durch den WA5 ersetzt. Von diesen gibt es folgende Varianten:
WA5 Mini – der Basisdecoder aber ohne Relaisfunktion.
WA 5 – WA5 Mini mit Relaisbaustein
Sonderbausteine mit anderer Relaisschaltung – hauptsächlich für spezielle Gleissysteme.
Der WA5 Mini lässt sich mit einem Erweiterungsbaustein zum WA5 erweitern.2unter Artikelnummer 3961.
Die Sonderbausteine erlauben die Ansteuerung mehrere Weichenherzen im Rahmen der Herzstückpolarisierung. Dies ist insbesondere bei Tillig-DKWs der Fall. Die Sonderbausteine sind aber nicht unbedingt erforderlich – ich selbst habe diverse Weichen der Firma Tillig im Einsatz (Reihe Tillig Elite) – siehe dazu auch die Beschreibung im Download Bereich.
Bausatz oder Fertigbaustein?
Bausätze sind günstiger und Bauen macht Spaß!
Aber nicht jeder Bausatz lässt sich auch einfach montieren – und nicht jeder mag Elektronikteile löten. Ein weiteres Problem: Wenn es nicht funktioniert ist die Schuldfrage oft schwierig. Habe ich den Fehler gemacht oder ist ein Baustein defekt?
Nachdem ich inzwischen über 40 MBTronik Bausteine des Typs WA5 und WA4 eingesetzt habe – ohne irgendeine wirkliche Ahnung von Elektronik zu haben – kann ich sagen, das es wirklich einfach ist die Bausätze von MBTronik zu bauen. Kein einziger war bisher defekt.
Ein Gehäuse kann man mit kaufen. Ich rate aber davon ab. Staub macht der Elektronik nichts aus – und ich habe keinen einzigen Baustein nach über 10 Jahren Betrieb wegen Staubproblemen verloren. Der einzige Verlust war ein falsch eingebautes IC. Auch verwendet MBTronik keinerlei komplexe SMD Technik wodurch das Löten sehr einfach ist.
MBTronik liefert eine gute Anleitung für den Zusammenbau mit der nichts hinzuzufügen ist. In Nächternhausen sind alle Servodecoder selbst zusammengebaut. Wenn man mehrere bestücken muss, so kann man nach dem ersten erfolgreichen Zusammenbau mehrere parallel bestücken. Halten sie sich an die Anleitung und es kann eigentlich nichts schief gehen.
Letztlich muss aber jeder für sich selbst entscheiden ob Bausatz oder fertige Bestückung.
Decoder mit Relais oder ohne?
Punktkontakt (aka “Märklin”)-fahrer können dieses Kapitel überspringen. Für alle anderen gilt:
Polarisieren sie alle Herzstücke ihrer Weichen! Nur so ist ein störungsfreier Betrieb gewährleistet.
Und genau hierfür benötigen wir die Decoder mit der erweiterten Relaisfunktion (WA5). Die Decoder ohne Relaisfunktion heißen “WA5 Mini”. Die Decoder ohne Relais verwendet man hauptsächlich für Signale, Tore, und alle Arten von Servos die keine Abhängigkeiten haben. Aber: Nicht alle Weichen benötigen den – teureren – WA5! Siehe dazu weiter unten das Kapitel zum Thema Relaisschaltung.
Es gibt auch die Möglichkeit zusammen mit dem Servo einen Mikroschalter zu bewegen. Das ist aber von der Einbausituation abhängig und auch eher etwas für die Spezialisten da man ja jeweilig einen Schalter für jede Endlage benötigt. Ich empfehle da eher die sichere Variante.
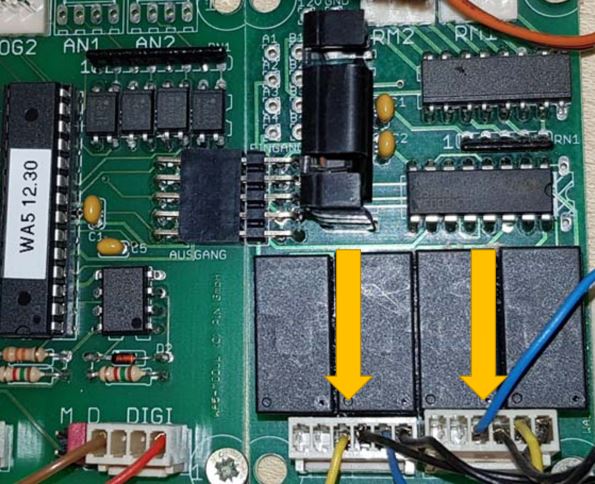
Verschaltung Relaisbaustein WA5
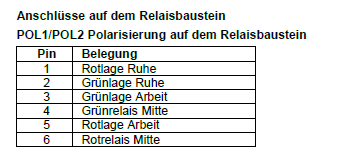
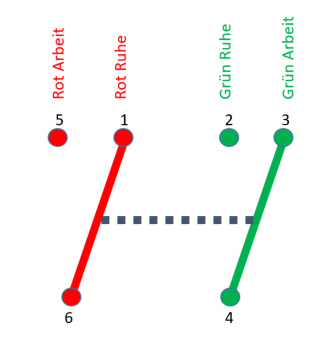
Die Verschaltung des Herzstücks beim Relaisbaustein ist in der Dokumentation ausreichend beschrieben. Dabei bitte beachten: Auf jedem Relaisbaustein sind 2 Relais und anfangs hatte ich doch etwas Probleme mit der Dokumentation die da lautet:
Gemeint ist damit, das Pin 6 jeweils Verbindung mit Pin3 hat wenn der Servo in Stellung Grün ist und Verbindung nach Pin 2 wenn der Servo in Stellung Rot ist. Mir hat erst eine Darstellung als Relaisschaltbild geholfen es zu verstehen (habe da auch vielleicht die falsche Denkweise für):
Relaisschaltbild WA 5 Decoder
Bei Bewegung des Servos ist keiner der Kontakte mit Pin 4 und 6 verbunden. Herr Holtermann empfiehlt die Pins 4 und 6 als Lötbrücke auf der Platine zu verbinden. Mit der Verbindung außerhalb der Platine bin ich aber wesentlich flexibler was den Einsatz angelangt. Man kann dann mehr machen als nur eine Herzstückpolarisierung. Ich verwende in Nächternhausen diese Relais z.B. bei der Kehrschleifenweiche um die Polung zu wechseln.
Genau genommen bräuchte man nun keine Verbindung von 4 und 6 weil man auch ausschließlich 4 oder 6 verwenden könnte zur Polarisierung. Tatsächlich hatte ich aber Probleme mit Tillig Weichen älterer Bauart (s.u.).
Daher empfehle ich generell die Verschaltung gemäß Dokumentation. Im realen Leben sieht das dann so aus:
Tilligweichen alter Bauart und Weichen mit durchgehenden Zungen.
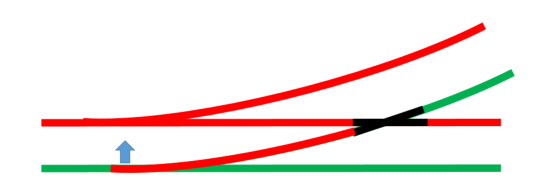
Eine Besonderheit stellen Tilligweichen alter Bauart dar. Hier hatte ich immer wieder Kurzschlüsse als ich nur ein Relais verwendet hatte (also Pin 2,3,4). Dazu muss ich sagen, das ich auch die Zunge mit der Spannung aus der Herzstückpolarisierung verwendet habe, da der Anpressdruck i.d.R. alleine nicht ausreicht um die Zunge dauerhaft mit Strom zu versorgen.
Meine Vermutung: Bei Tillig werden die durchgehende Zungen der Weiche zusätzlich mit Strom über die Backenschiene versorgt! Schaltet jetzt das Relais um bevor das Servo die Backenschiene vollständig elektrisch von der unteren Schiene getrennt hat, so kommt es zum Kurzschluss! Die Weiche hat kurzzeitig parallel Verbindung über die anliegende Zunge mit dem Versorgungsbereich grün:
Weichenbewegung WA5 – Kurzschluß
. Auch wenn diese nur wenige Millisekunden andauert reicht es das die Zentrale abschaltet.
Das Problem hat nichts mit dem WA5 zu tun. Durchgehende Zungen sind vorbildorientiert. Wer solche Weichen verwendet muss daher entweder die Zunge hinter dem Herzstück auftrennen, oder die Weiche anders verschalten. Wie dies funktioniert habe ich in einer PDF im Downloadbereich beschreiben.
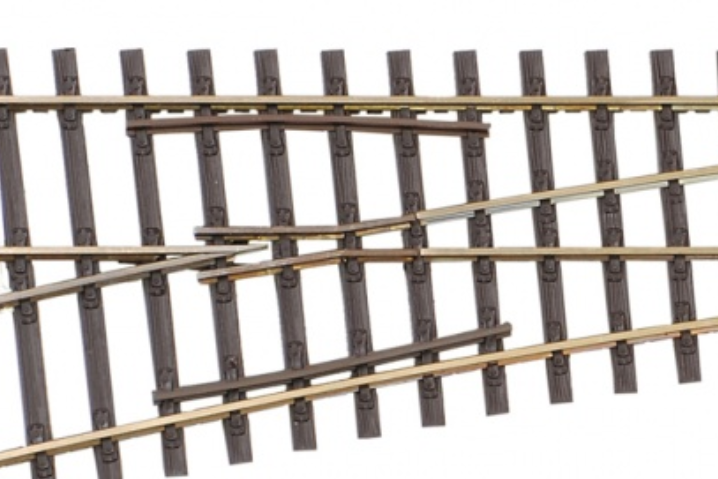
Neue Tilligweichen verschalten
Neuere Tilligweichen haben dieses Problem nicht
Man beachte die unterschiedlichen Herzstücke. Bei den neuen Weichen sind diese von der durchgehenden Zunge getrennt. Bei den alten Weichen sind diese verbunden.
Tilligweiche neuer Bauart
Tilligweiche alter Bauart
Trotzdem sollte man auch bei den neuen Weichen die Zunge zusätzlich mit Spannung versehen und nicht darauf vertrauen das dauerhaft die Verbindung über die Backenschiene vorhanden ist – dazu benötigen wir aber kein Relais, eine einfache elektrische Verbindung auf der Unterseite reicht aus.
Alle Weichen dann mit WA5 ausstatten?
Nein! Selbstverständlich kann ich mit einem Relaisbaustein auch eine 2. Weiche mit der Polarisierung versehen.
Zu beachten ist lediglich, das man
a) bei Verwendung alter Tilligweichen die Stellschiene entweder vom Herzstück trennt, oder aber man verwendet beide Relais gemäß der Herstellerdokumentation.
b) die 2. Weiche eine Abhängigkeit von der 1. Weiche haben sollte. Nur wenn Weiche 1 auch bedeutet das man Weiche 2 schalten muss macht eine Polarisierung der 2. Weiche gemäß Stellung der 1. Weiche Sinn. Beispiel:
Weichenverbindung Parallelgleis
Einbau und Inbetriebnahme
Die Inbetriebnahme ist in der Dokumentation hinreichend erklärt. Für die Einstellung empfiehlt sich das zusätzliche Programmiergerät von MBTronik3. Man kann sich so ein Gerät auch mit wenig Aufwand selbst herstellen – falls ihr daran Interesse habt schickt mir einfach eine PN. Wenn die Anlage größer ist, kann man die Kabel auch problemlos verlängern und so den unterirdischen Servo oberirdisch einstellen.
Da ich einmal dazu zu faul war das Programmiergerät zu verlängern, half ein anderer Trick: Skype auf dem Handy installieren und mit einem 2. Handy (vielleicht hilft da ja der/die Partner*in) das erste per Skype (o.ä.) Videocall anrufen. Dann eines der Handys vor das Signal oder die Weiche platzieren. Der Trick funktioniert auch gut in nur schwer einsehbaren oder unzugänglichen Bereichen der Anlage!
Niemals die Servos einbauen und sofort an die Weiche und den Decoder anschließen. Servos haben einen Ruhepunkt der von der Elektronik initial angefahren wird. Leider sind neue Servos nicht immer auf diesen Punkt eingestellt. Dies würde bei angeschlossener Weiche zu so hohem Anpressdruck führen, dass die Weichenzungen kaputt gehen würden. Ich habe mir angewöhnt alle neuen Servos erst einmalig kurz an einem WA5 initial anzuschließen der noch nicht konfiguriert wurde oder der mittels Reset auf den Grundzustand gesetzt wurde!
Versorgen Sie alle Servos mit einer eigenen Stromversorgung und mit eigener Zuleitung – die sollte mindestens 1.0mm² Durchmesser haben (zumindest bis zum Verteiler).
Fehlersuche
Beim Betrieb von Servos gibt es ein paar Punkte zu beachten. Viele Probleme scheinen mir damit zusammenzuhängen, das Servos beim Einschalten immer zuerst kurz vor und zurück schalten um dann die aktuelle Lage genau zu positionieren. Bei hunderten von Servos kann man sich vorstellen, das dies zu Problemen führen kann. Es gibt aber Abhilfe und die folgenden Tipps sind sicher für den Ein- oder Anderen hilfreich.
Servos brummen
Nachdem ich ca. 30 Antriebe eingebaut hatte fingen die Antriebe beim Einschalten an zu zittern oder zu brummen – teilweise ließen sich die Zuckungen der Servos nur dadurch abstellen, dass die Servokabel mehrerer, nebeneinander liegender Steuerungen abgezogen wurden – nicht sehr hilfreich. Kurt Haders (der Entwickler des Decoders) hat mir dann noch einige Tipps gegeben die nicht in der Anleitung standen.
Aus dem Flugmodellbau kennt man s.g. „Ferritkerne“ die Fehlerströme vermeiden helfen. Häufig sind vor allem Servokabelverlängerungen Grund für unkontrolliertes Brummen – auch und gerade beim Einschalten. Hier sollte man einfach mal probieren ob ein Ferritkern das Brummen abschaltet. Bei einigen Servos war das Brummen danach weg – auch wenn diese nicht verlängert wurden! Insgesamt brauchte ich aber nur 8 solcher Kerne für die gesamte Anlage. Ferritkerne sind im Elektronikhandel erhältlich – teilweise aber auch an vorhandenen USB Anschlüssen am PC vorhanden (damit kann man schon mal ausprobieren):
Auf keinen Fall sollte man die Möglichkeit verwenden die Stromversorgung der Steuerung von einem der anderen Bauteile weiterzuleiten – die Möglichkeit auf den WA-Bausteinen verleitet leider schnell dazu. Stattdessen immer die Digitalstromversorgung von einem Hauptverteiler beziehen! Nutzt man die Weiterleitung über die Platine kann es dazu führen das einzelne Bausteine nicht mehr schalten.
Servos flattern oder zucken
Servo defekt: Leider sind auch nicht alle Servos fehlerfrei. Ich verwende von Conrad Elektronik die kleinen ES5 Servos – leider gibt es dabei ab und an auch Ausschuss. Tauschen Sie den Servo aus und prüfen Sie ob der Servo immer noch zuckt. Von einer Lieferung mit 30 ES5 waren 4 Stück defekt – leider zeigt sich dieser Fehler erst beim Anschluß am WA5…
Alle oder einzelne Servos flattern nach dem Einschalten und hören damit nicht mehr auf: Ich habe als Stromversorgung für die WA5 einen alten Schultransformator (die man vielleicht noch aus dem Physikunterricht kennt). Das Teil liefert 9A (!) bei 16V Wechselstrom. Messen sie den Stromverbrauch beim Einschalten – und prüfen sie, ob dies der vorhandene Transformator hergibt.
Man sollte Wechselstrom vermeiden – auch wenn es damit eigentlich auch geht. Und man sollte vermeiden die Stromversorgung langsam einzuschalten – falls man über einen Poti einschaltet diesen gleich auf Anschlag drehen!
Einzelne Servos flattern nach dem Einschalten: Die beste Stromversorgung nutzt nichts, wenn man große Leitungslängen nutzt (als Beispiel >3m) . Ich verwende einen durchaus großen Leitungsquerschnitt von 1,5 mm². Trotzdem haben bei mir immer wieder einige Servos geflattert beim Einschalten. Leider flattern nicht nur die hintersten Servos in einer Reihe, aber man sollte sich überlegen die Servos die am weitesten von der Stromversorgung entfernt sind (bei mir immerhin ca. 8m Leitungslänge) mal abzuschalten. Geholfen hat dann ein kleiner zusätzlicher lokaler Trafo für die hinteren Stränge und schon ging alles ohne Flatterprobleme!
Servos schalten nicht oder flattern: Immer mal wieder messen wie viel Strom gezogen wird – anfangs hatte ich einen drei normale Trafos – die haben nur 1.5 A gehabt und sind schnell am Anschlag. Auch hier zeigt sich, dass eine eigenständige Stromversorgung für die WA5 dringend erforderlich ist!
Ich hoffe diese kleine Beschreibung hilft beim Einsatz der Servodecoder – ich bin jedenfalls hochzufrieden damit! Leider kann ich nur von meinen Erfahrungen mit Gleismaterial von Roco und Tillig berichten. Wenn ihr Erfahrungen mit anderen Weichen, Herstellern oder Decodern gemacht habt oder Fragen, dann nutzt doch bitte die Kommentarfunktion!
P.S: Um allen Fragen zuvor zu kommen: Ich habe weder eine verwandtschaftliche Verbindung mit dem Hersteller, noch erhalte ich dafür irgendwelche finanzielle Unterstützung seitens des Herstellers.
Gestern habe ich mir mal wieder eine Dampflok vorgenommen zu aktualisieren – eine s.g. Malletlok, BR 96 der ehemaligen Firma Rivarossi aus dem Jahre 1985:
Nachschub einstellen!
Ein wunderschönes Modell welches ich vor vielen Jahren digitalisiert hatte – im Bild oben sieht man die Lok gerade bei der Beendigung ihrer Hauptbestimmung: Dem Nachschub schwerer Züge auf Steilstrecken.
Nur: Ich hatte keine Ahnung mehr, welchen Decoder ich eingebaut hatte. Mittels der Herstellerkennungs CV konnte ich noch ganz gut auslesen, das es sich um einen ESU Decoder handelt, aber mit meiner Vermutung das es ein LokPilot V3 sein könnte war ich wohl irgendwie auf dem Holzweg!
In der Vergangenheit habe ich die Lok dann aufgeschraubt, Bild vom Decoder gemacht und im Netz geschaut welches Decoderbild denn am Besten passt – ist nicht immer sehr hilfreich weil manche Versionen fast identisch aussehen und kaum voneinander zu unterscheiden sind.
Trainprogrammer oder Lokprogrammer oder wie?
Wohl dem der einen ESU Lokprogrammer hat – nur: Die Programmer kosten richtig viel Geld und wer – wie ich – viele verschiedene Decoder im Einsatz hat der wird nicht über 1000€ ausgeben wollen um von jedem Hersteller einen eigenen Programmer zu kaufen. Und was dazu ärgerlich ist: Oftmals benötigt man für alte Decoder einen anderen Programmer des gleichen Herstellers. Deshalb verwende ich den Trainprogrammer – nur: Der sagt mir leider nicht die Versionsnummer oder den Decodertyp.
Aber: Man kann mittels CV den Lokdecodertyp bei ESU auslesen – und bekommt dann einen schönen (hexadezimalen) Wert zurückgeliefert der einem dummerweise nun garnichts sagt. Um daraus zu lesen ob es sich um einen ESU LokPilot V4.0 DCC oder einen ESU LokPilot V4.0 XL handelt muss man eine Referenztabelle besitzen. ESU hat zum Glück ein eigenes Forum in welchem ich dann auch netterweise die Rückmeldung erhalten habe, das man den LokProgrammer auch ohne die Hardware installieren kann und dann eine Liste der Decoder erhält.
Dann halt selber machen mit Excel
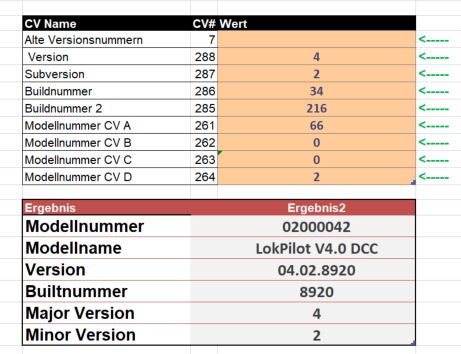
Also habe ich eine Excelliste erstellt mit einer Eingabemaske der Werte und man als Ausgabe die Version und den Typ des ESU Lokdecoders erhält. Im Downloadbereich findet ihr diese Excel und dürft sie gerne verwenden.
Bestimmung des Lokdecoders mittels CV Variablen
Zur Benutzung der Excel muss man die angegebenen CV Werte auslesen und in die Liste eintragen. Als Ergebnis erhält man den Namen des ESU Decoders sowie die jeweilige Softwarerelease des Decoders (Version). Beim Auslesen von CV>255 bitte darauf achten das vorher CV31=0 und CV32=255 gesetzt sein müssen
Meine 96er konnte ich damit jetzt endlich so programmieren, das sie auch noch im langsamsten Fahrbereich einwandfrei läuft und auch der Motor sich wieder einigermassen gefällig anhört.
Noch ein Tipp zur Nutzung der Excelliste: ESU hat leider erst ab LoPi 3.0 die Möglichkeit eröffnet Typ und Version auszulesen. CV7 prüft ob es sich um einen LokPilot V1 handelt – ich vermute auch das dann auch CV>255 nicht vorhanden sind. Vielleicht kann das ja mal jemand testen der einen LoPi V1 noch zur Hand hat.
Letzten Monat hatte ich mich mal wieder über den PC geärgert der meinte er müsste mal eben gerade irgendwas anderes machen anstatt die Modellbahn zu steuern. In der Folge liefen die Loks noch eine Zeitlang planlos ohne Steuerung und wurden vor dem Absturz in die Tiefe zum Glück nur noch von einer Auffangmatte aufgehalten 😡
Ein Kollege hat mal gesagt: Software ist böse! Er meinte damit vor allem die Software der Betriebssysteme. Nicht meine Steuerungssoftware war schuld, sondern irgendein Update der im Hintergrund meinte er müsste mal eben alle Systemresourcen fressen.
In grossen Infrastrukturen werden Fertigungssysteme auch nicht dem Computer überlassen – hier gibt es s.g. Wachhunde (Watchdogs), welche laufend die Verbindung zum Computer überprüfen und im Fehlerfall entsprechende Maßnahmen einleiten und das System geregelt abschalten.
Und tatsächlich: Das gibt es auch für die Modellbahn. Nach intensiver Lektüre der Dokumentation meiner TAMS B-4 Booster konnte ich dort folgendes nachlesen:
“Die Zentrale (i.d.R. gesteuert durch eine PC-Software) sendet bei dieser Funktion in Abständen von ca. 5 Sekunden einen DCCWeichenstellbefehl an eine Weichenadresse, die dem B-4 zugewiesen wurde. Sobald der B-4 diese Befehle nicht mehr empfängt, schaltet er sich automatisch ab. Nach dem Einschalten des Boosters ist die Watchdog-Funktion zunächst inaktiv. Sie wird aktiviert, indem an die zugeordnete Weichenadresse ein Stellbefehl gesendet wird. Damit besteht die Möglichkeit, die Anlage ohne PC-Steuerung zu steuern, ohne die Watchdog-Funktion zu deaktivieren.“
Das war genau was ich gesucht hatte. Und natürlich dachte ich zunächst: Ist doch wunderbar! Nach genaueren Recherchen fand ich heraus, das es sogar eine Funktion ist die bei vielen Digitalzentralen und Boostern vorhanden ist!
Wir müssen unserer Steuerungssoftware also nur noch klarmachen in festen Zeitintervallen einen “BinNochDa”-Befehl zu senden. Sobald der PC dann denkt es wäre Zeit etwas anderes zu tun oder ganz hängen zu bleiben würde der Befehl ausbleiben oder zu spät kommen – die Booster würden abschalten und die teuren Loks wären gerettet! 1 Wie ihr wisst steuere ich meine Anlage mit der Software Traincontroller – die Umsetzung sollte aber auch in anderen Steuerungsprogrammen möglich sein.
Nun wäre es eigentlich ein einfaches eine während der gesamten Sitzung laufende Loop zu machen in welcher periodisch laufend ein Stellbefehl für den Booster aktiviert wird. Allerdings haben wir dabei mehrere Probleme:
Wird aus dem laufenden Betrieb in TC in den Editormodus geschaltet so unterbricht TC diese Loop. Damit würden auch sofort die Booster abschalten.
Die Zeitabstände sind nicht immer einzuhalten. So habe ich festgestellt, das eine normale Loop im laufenden Betrieb und unter Last des PC auch mal länger laufen kann als geplant. Die Folge davon ist klar: Der Booster wird abschalten.
Das Problem lässt sich natürlich mit TC lösen – allerdings müssen wir dazu etwas tiefer in die „Trickkiste“ von TC greifen. Punkt 1 lässt sich mittels eines Melders einfach lösen – Punkt 2 ist etwas komplizierter. So ist es in TC so, das eine Loop in einem externen Zubehör eigenständig abläuft – warum wissen die Götter äh Programmierer – und zwar immer und unabhängig von den “Aussenbedingungen” in dem festgelegten Zeitintervall. Also müssen wir ein externes Zubehör erstellen (wer bis hierher mitgelesen hat: Im Downloadbereich findet sich dieses Zubehör sodaß es jeder nutzen kann und nur importieren muss – die Beschreibung hier ist also vornehmlich zur Erklärung):
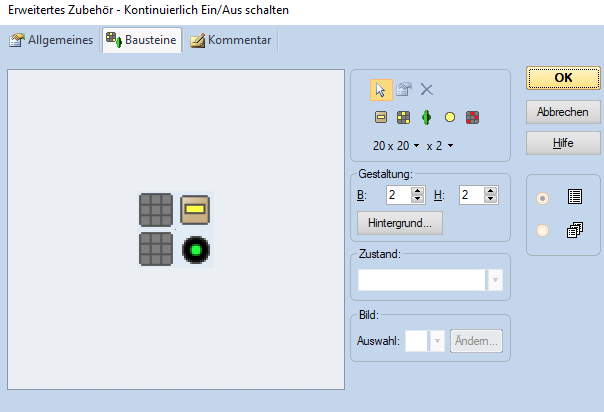
Erweitertes Zubehör – “Kontinuierlich EIN/AUS”
Wir benötigen 4 Elemente – wobei diese Elemente relativ einfach gestrickt sind (von rechts nach links): Eine Anzeige, ein Taster (Stellbefehl), ein Schalter und ein 2. Taster (Taster2). Die eigentliche Arbeit macht der Schalter unten rechts beim einschaltenden Zustand:
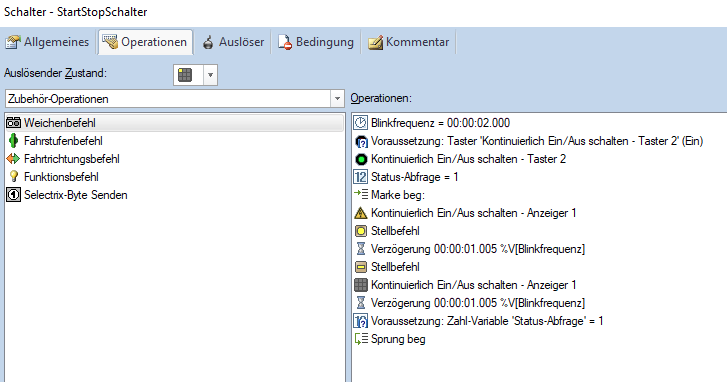
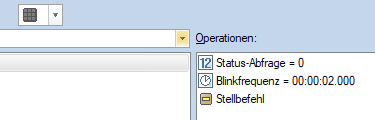
Erweitertes Zubehör – Schalter für Blinkfrequenz
Hier findet sich eine Variable in welcher wir festlegen, in welchem Zeitintervall der Stellbefehl ausgeführt werden soll. Meinen B-4 reichen eigentlich 10 Sekunden, aber Sicher ist Sicher – daher sende ich den Befehl hier im Beispiel mal alle 4 Sekunden (der reale Wert ist das doppelte des angegebenen Werts!).
So lange der Taster2 aktiv ist, wird jeweils die Anzeige eingeschaltet, der Stellbefehl mit dem Taster “Stellbefehl” gesendet und sich dann wieder 2 Sekunden Schlafen gelegt. Dann wird der Taster offiziell Ausgeschaltet, wieder 2 Sekunden gewartet und wieder eingeschaltet.
Der Ausschaltvorgang unseres Schalters ist dann eigentlich nur noch das Rücksetzen der Statusabfrage. Auch hier steht nochmal die Blinkfrequenz (kann man hier auch löschen!)
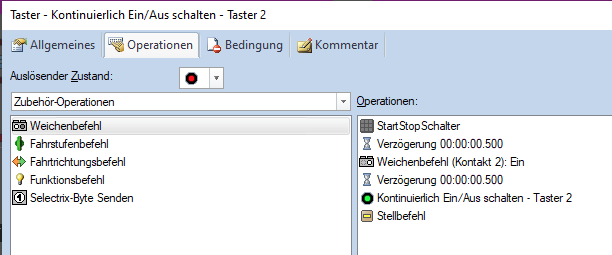
Der eigentliche Befehl wird also von Taster2 gesendet – das sieht dann so aus:
Externes Zubehör: Stellbefehl senden
Wie man sieht arbeiten wir hier mit einem Weichenbefehl – und das ist schon die ganze “Magie” in diesem externen Zubehör. Die Spezialisten für externes Zubehör können sich gerne das ganze im Detail anschauen. Und was Punkt 1 anbelangt der Problemstellung: Das erkläre ich gleich unten bei der Installation. Was mir aber wichtig war:
Es funktioniert (seit mehreren Wochen) genial gut!
Und wie kann man das benutzen?
Klar – ich schreib das ja jetzt hier nicht nur um euch die Nase lang zu machen, sondern damit ihr es auch selbst verwenden könnt in euren Anlagenkonfigurationen. Dazu braucht es zunächst natürlich einen (oder mehrere) Booster die auch mittels Wachhund-Befehl aktivierbar sind. Schreibt euch die Adresse (in unserem Falle eine DCC Adresse auf) – wir brauchen sie später noch. Ach ja: Und testet die Adresse aus – also legt einfach eine Weiche an mit der Adresse und schaltet die mal ein – und aus – und ein – und aus. Nach einem gewissen Timeout sollte euer Booster jetzt abgeschaltet haben.2 (Tut er das nicht solltet ihr die Kiste einschicken oder den Hersteller fragen – manchmal ist es nur ein Firmwareproblem wenn es nicht wie geplant funktioniert)
Jetzt könnt ihr auch gleich noch eine 2. “Weiche” anlegen – weil ihr jetzt nämlich euren Booster ausgeschaltet habt – aber ihr müsst ja auch eine Möglichkeit haben ihn wieder über die Software einzuschalten. Auch das findet sich in der Dokumentation des Boosters. Statt einer Weiche könnt ihr aber auch einfach einen x-beliebigen Schalter verwenden dessen Kontakte eine Funktion schalten.
Nun können wir es in TC auch installieren, oder?
Ja – dazu brauchen wir zunächst mal das zusätzliche externe Zubehör welches sich im Downloadbereich findet oder hier: [ddownload id="1240"]
Zum Import in TC im Reiter Zubehör – Erweitertes Zubehör – Bibliothek für erweitertes Zubehör – Import wählen 3falls es ausgegraut sein sollte müsst ihr vorher erst eine Tab mit einem Stellwerksfenster aktiviert haben
Nun könnt ihr dieses erweiterte Zubehör auch an eure Booster anpassen – oder ihr könnt die Einstellung von 4 Sekunden lassen. Falls ihr es anpassen müsst solltet ihr in der Bibliothek die Funktion “Eigenschaften” auswählen. Dort wählt ihr den Schalter unten links im Bild und ändert die Blinkfrequenz – in beiden auslösenden Zuständen. Damit ist das erweiterte Zubehör einsatzbereit!
Das wars aber nicht – was ist mit der Konfiguration in TC
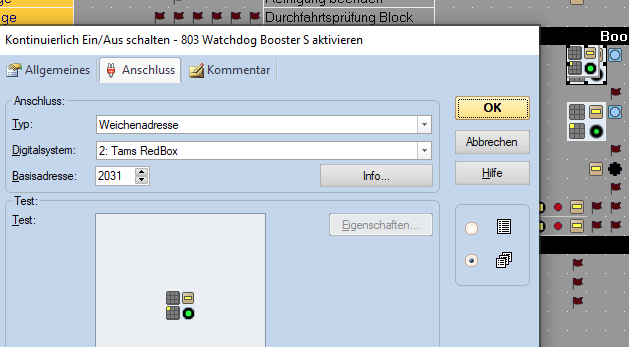
Nee – das wars noch nicht. Jetzt müssen wir das Zubehör auswählen und in TC im Stellwerk platzieren. Danach mit Rechtsklick geben wir ihm eine Adresse – und zwar genau die Adresse welche den Watchdog eures Boosters aktiviert:
Externes Zubehör – Watchdogadresse konfigurieren
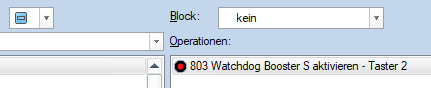
Soweit so gut. Aber wir benötigen noch einen Schalter mit dem wir den Watchdog aktivieren – den sieht man im Bild ganz rechts
Schalter für externes Zubehör – EINSchalter für externes Zubehör – AUS
Das wars auch schon – jetzt wird das externe Zubehör kontinuierlich den Watchdog-Befehl senden sobald der Schalter aktiviert ist. Aber Achtung: Wenn der Schalter ausgeschaltet ist, dann ist auch der Watchdog ausgeschaltet – und euer Booster gleich mit! Deshalb sollte man beim Einschalten der Anlage direkt nach dem Einschalten der Booster auch den Watchdog aktivieren und aktiviert lassen!
Da war doch noch was mit dem Editiermodus?
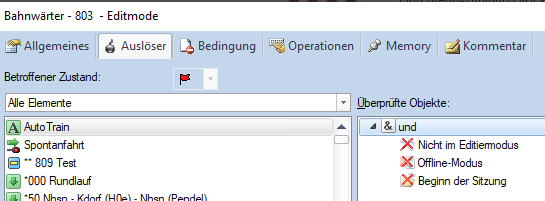
Richtig – den hätte ich fast vergessen! Wenn wir nämlich bei TC in den Editiermodus gehen, dann wird auch unser Watchdog seine Loop beenden – was wir aber in der Regel eigentlich vermeiden wollen. Man will vielleicht auch im Editiermodus noch einen funktionierenden Booster haben – wüsste eigentlich auch kaum einen Fall wenn nicht. Zum Glück hat TC hier einen Monitor welcher uns mitteilt das der Editiermodus aktiv ist. Und das macht für uns ein Bahnwärter den wir erstellen und der folgenden Auslöser hat:
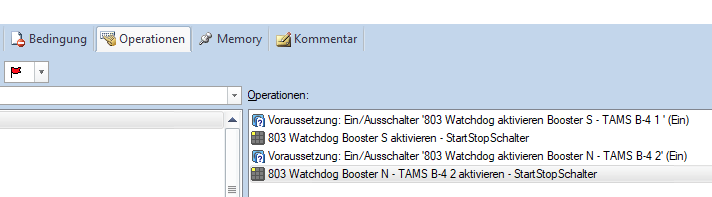
Bahnwärter für EditiermodusBahnwärter Operationen
Die Operationen für das Einschalten und für das Ausschalten (!) sind identisch – in jedem Falle wird der Watchdog aktiviert – in diesem Falle indem wir direkt das externe Zubehör aktivieren. In obigem Beispiel gibt es 2 Booster (S und N) die jeweils aktiviert werden. Die zusätzliche Voraussetzung stellt noch sicher das dies nur passiert wenn der Watchdog auch aktiviert wurde.
Thats it! Und wer es nochmal genau nachschauen will kann sich auch gerne meine aktuelle TC Datei anschauen – die findet sich auch im Downloadbereich.
Viel Spass damit und ich hoffe ihr habt eure Moba damit ein wenig sicherer gemacht!
Visits: 1032
Translate »
Diese Website benutzt Cookies. Wenn du die Website weiter nutzt, gehen wir von deinem Einverständnis aus.OKNeinDatenschutzerklärung